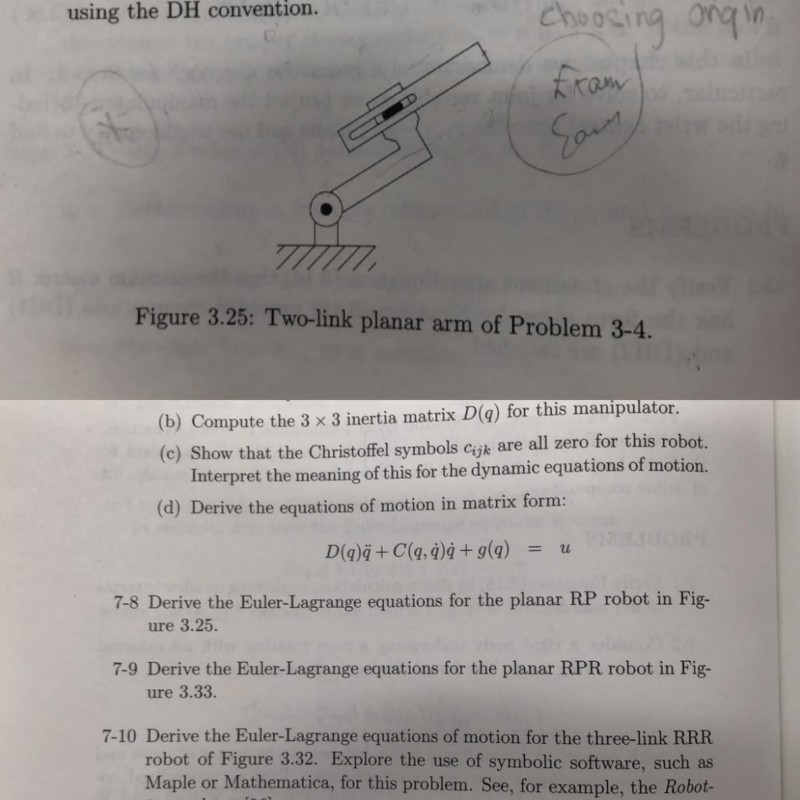
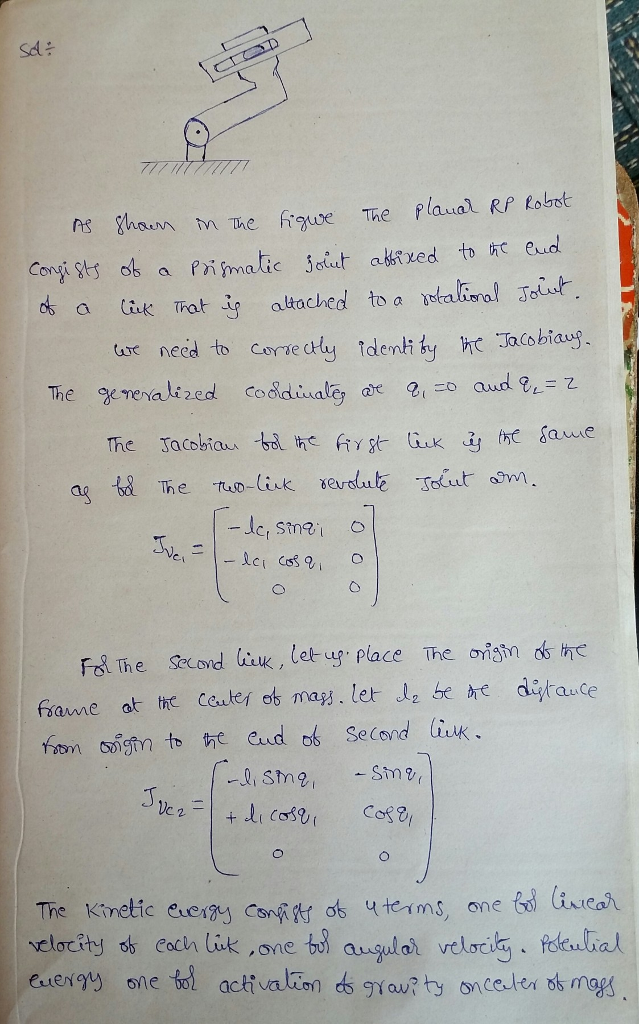
I need the solution for the question 7-8. thank you in advance.
ahmad alhayek تصميم ahmad alhayek جميع الحقوق محفوظة 2016

ليست هناك تعليقات:
إرسال تعليق